 AutoBot 是一种用于预测多智能体未来轨迹的生成式模型,它结合了:
AutoBot 是一种用于预测多智能体未来轨迹的生成式模型,它结合了:
-
Set Transformers:处理集合结构(如不定数量的代理人)。
-
Sequential Modeling:处理时间序列依赖。
-
Latent Variables:使用 离散隐变量 捕捉多模态未来。
-
Transformer Encoder-Decoder 架构:整合社交(代理人间)和时间维度。
从图中可以看到输入是agents* time,代表每个agent各个时间步的信息,
架构
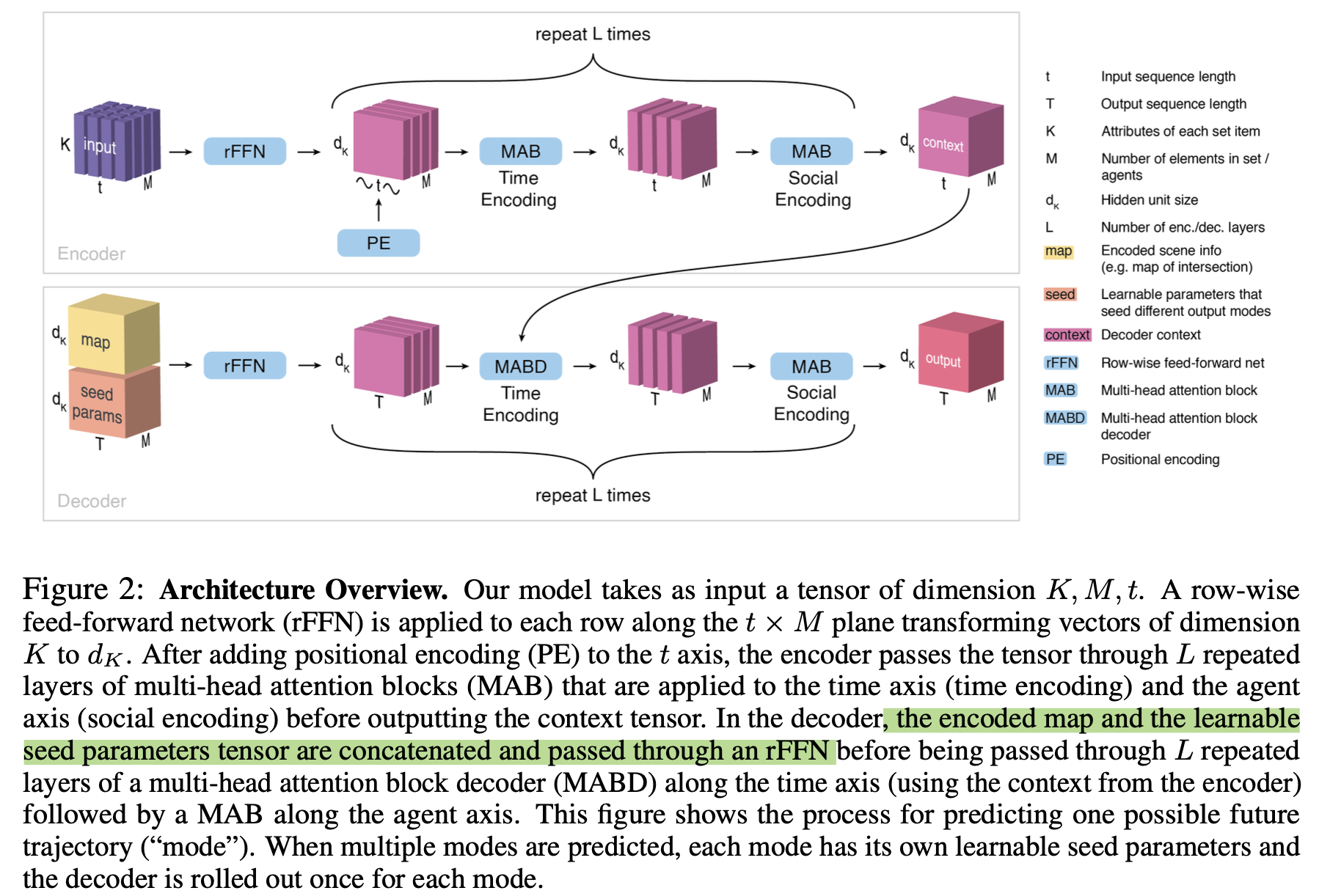
1. Encoder(时序-社交特征编码)
Step 1:行向嵌入(Row-wise FFN)
- 每个 agent 在每个 timestep 的 K维向量通过一个前馈网络嵌入到隐藏空间维度$d_K$。
Step 2:时间轴处理(Temporal Attention)
- 将所有 agent 的历史轨迹视为独立时间序列,使用 MHSA 对时间维进行注意力建模。
Step 3:社会轴处理(Social Attention)
- 在每个 timestep 上,对所有 agent 进行注意力建模,获取 agent 间交互信息。
Step 4:交替叠加
- Temporal + Social MHSA 操作交替叠加 $L_{enc}$ 层,输出上下文张量:
$C \in \mathbb{R}^{d_K \times M \times t}$ - 具备 permutation equivariance(排列等变性)对 agent 顺序不敏感
-
2. Decoder(多模态轨迹生成)
Step 1:构造 seed 参数
-
为每个潜在模式 $Z_i$,定义 使用 c组 learnable seed 参数 $Q_i \in \mathbb{R}^{d_K \times T}$,代表不同未来模式
- 将其 复制 M 次 得到 $Q’_i \in \mathbb{R}^{d_K \times M \times T}$。
NOTE:使得模型推理和训练快是因为$Q_i$($Q_i \in R(dk ,T )$ ,where $i \in {1, …, c}$) 一一对应一个离散隐变量 其次,它们通过允许AutoBot在不进行序列采样的情况下,仅通过解码器的一次前向传播(single forward pass)即可对整个场景进行推理,从而提高了AutoBot的速度。先前的工作(例如,Tang and Salakhutdinov (2019))使用具有交错社交注意力(interlaced social attention)的自回归采样(auto-regressive sampling)来预测未来场景,这使得能够实现具有社交一致性的多智能体预测。其他工作(例如,Messaoud et al. (2020))采用单输出多层感知机(single output MLP)通过一次前向传播来独立生成每个智能体的整个未来轨迹。AutoBot利用Transformer的注意力机制,通过从每个种子参数矩阵(seed parameter matrix)确定性地解码未来场景,结合了这两种方法的优点。在附录C.5中,我们将AutoBot的推理速度与其自回归对应方法进行了比较。
-
自回归(autoregressive)模型:
-
一次生成一个时间步的轨迹;
-
每一步都 依赖前一步的输出,所以不能并行;
-
时间复杂度为 O(T),需循环 T 次;
-
常用于LSTM、Transformer decoder(如GPT-style decoder)等。
-
AutoBot 的优化点: AutoBot 用的是:
-
非自回归(non-autoregressive)解码器
-
每个隐变量 $Z_i$ 对应一个 learnable seed $Q_i \in \mathbb{R}^{d_K \times T}$
-
seed 被复制 M 次,形成输入张量 $Q’_i \in \mathbb{R}^{d_K \times M \times T}$
然后:
-
所有 T 步 + 所有 M 个智能体 一次性送入 Transformer 解码器;
-
不需要像 RNN 那样逐步采样;
“序列采样”指的是每一步依赖上一时间步输出逐步生成的过程(如RNN/GPT的推理方式)
Step 2:融合环境信息
- 从地图图像提取环境向量 $m_i$(CNN提取),广播为张量 $M_i \in \mathbb{R}^{d_K \times M \times T}$;
- 与 $Q’_i$ 拼接后通过 rFFN 得到 $H_i$。
Step 3:两阶段注意力处理
-
时间注意力(MABD):使用 encoder 输出 C 和 decoder输入 $H_i$,对时间维建模;
-
社会注意力(MAB):在每个 future timestep 对所有智能体做注意力计算。
Step 4:重复 c 次
-
每个 mode $i \in {1, …, c}$独立生成未来轨迹,输出张量:
$O \in \mathbb{R}^{d_K \times M \times T \times c}$
-
最后通过 MLP 投出轨迹坐标或高斯分布参数。
训练目标
使用 显式建模的离散隐变量 Z∈{1,…,c}Z \in {1, \dots, c}Z∈{1,…,c},通过 最大化似然函数 训练,形式如下:
$\log p_\theta(Y \mid X_{1:t}) = \sum_Z p(Z \mid Y, X_{1:t}) \log p_\theta(Y, Z \mid X_{1:t})$
求梯度
 因为 Z 是 离散变量,我们不能像连续变量一样直接用重参数技巧来采样。且后验 $p(Z \mid \mathcal{Y}, \mathbf{X}{1:t})$ 通常依赖于 $\theta$,所以计算会很复杂。
我们用一个易于处理的 近似分布$q(Z) = p{\theta_{\text{old}}}(Z \mid Y, X_{1:t}))$,目标变为:
因为 Z 是 离散变量,我们不能像连续变量一样直接用重参数技巧来采样。且后验 $p(Z \mid \mathcal{Y}, \mathbf{X}{1:t})$ 通常依赖于 $\theta$,所以计算会很复杂。
我们用一个易于处理的 近似分布$q(Z) = p{\theta_{\text{old}}}(Z \mid Y, X_{1:t}))$,目标变为:

该公式来源于 ELBO(Evidence Lower Bound)分解:
$\log p_\theta(\mathcal{Y} \mid \mathbf{X}{1:t}) = \mathbb{E}{q(Z)}[\log p_\theta(\mathcal{Y}, Z \mid \mathbf{X}{1:t}) - \log q(Z)] + \text{KL}(q(Z) \parallel p(Z \mid \mathcal{Y}, \mathbf{X}{1:t}))$ 我们定义 ELBO 为: $\mathcal{Q}(\theta, q) = \sum_Z q(Z) \log p_\theta(\mathcal{Y}, Z \mid \mathbf{X}_{1:t}) - \sum_Z q(Z) \log q(Z)$ 所以优化目标就变成了最大化下界 $\mathcal{Q}$,并最小化 KL 项。
论文使用了一个聪明的 trick,设定:
$q(Z) = p_{\theta_{\text{old}}}(Z \mid \mathcal{Y}, \mathbf{X}_{1:t})$
即用旧参数生成的模型作为近似分布,这样后验分布可以显式计算,因为 Z 是离散变量,枚举即可。
将联合分布展开:
$p_\theta(\mathcal{Y}, Z \mid \mathbf{X}{1:t}) = p\theta(\mathcal{Y} \mid Z, \mathbf{X}{1:t}) \cdot p\theta(Z \mid \mathbf{X}_{1:t})$
代入 ELBO 得:
$\mathcal{Q}(\theta, \theta_{\text{old}}) = \sum_Z p_{\theta_{\text{old}}}(Z \mid \mathcal{Y}, \mathbf{X}{1:t}) \left[ \log p\theta(\mathcal{Y} \mid Z, \mathbf{X}{1:t}) + \log p\theta(Z \mid \mathbf{X}_{1:t}) \right] \quad \text{(4)}$
同时最小化 KL 散度: $\text{KL}(p_{\theta_{\text{old}}}(Z \mid \mathcal{Y}, \mathbf{X}{1:t}) \parallel p\theta(Z \mid \mathbf{X}_{1:t}))$
此外,为鼓励多样性,引入了 最大熵正则项(mode entropy regularization):
$L_{\text{ME}} = -\epsilon \max_Z \sum_{\tau=t+1}^{T} H(p_\theta(X_\tau \mid Z, X_{1:t}))$
- $\mathbb{H}(\cdot)$:是 熵函数,度量概率分布的不确定性;
- 惩罚那些预测分布不够集中的模式;
- 鼓励每个离散模式 Z 在输出时保持明确、精确的预测。 综合所有部分,我们的训练目标变成: $\max_\theta \; \mathcal{Q}(\theta, \theta_{\text{old}}) - \lambda \cdot \text{KL}(p_{\theta_{\text{old}}}(Z \mid \mathcal{Y}, \mathbf{X}{1:t}) \parallel p\theta(Z \mid \mathbf{X}{1:t})) - \epsilon \cdot \mathcal{L}{\text{ME}}$
实验
4.1 NuScenes(自动驾驶轨迹预测)
任务设置:
-
输入:过去 2 秒内(2Hz 频率)ego-agent 的轨迹和周围车辆的历史轨迹 + 环境地图(鸟瞰图)。
-
输出:预测未来 6 秒的轨迹。
实验设置:
-
使用 AutoBot-Ego 模型,预测 ego-agent 的未来轨迹,设置 latent modes 数量为 c=10。latent mode指的是多种合理的未来情况
-
训练使用单张 GTX 1080 Ti GPU,仅需约 3 小时。
评估指标:
| 指标名 | 含义 |
|---|---|
| Min ADE (5)/(10) | 前 5/10 个预测轨迹中,平均点对点 L2 距离的最小值。 |
| Miss Rate Top-5/10 | 预测轨迹最大点误差超过 2m 的比例。 |
| Min FDE (1) | 最后一个点的预测误差。 |
| Off Road Rate | 预测轨迹偏离可通行道路的比例。 |
实验结果:
-
AutoBot-Ego (c=10) 在 Min ADE (10) 和 Off Road Rate 上取得最佳性能。
-
Ensemble(三模型集成)略有提升。
-
与其他方法如 Trajectron++、WIMP 等相比,AutoBot-Ego 在准确性与效率上达到平衡。
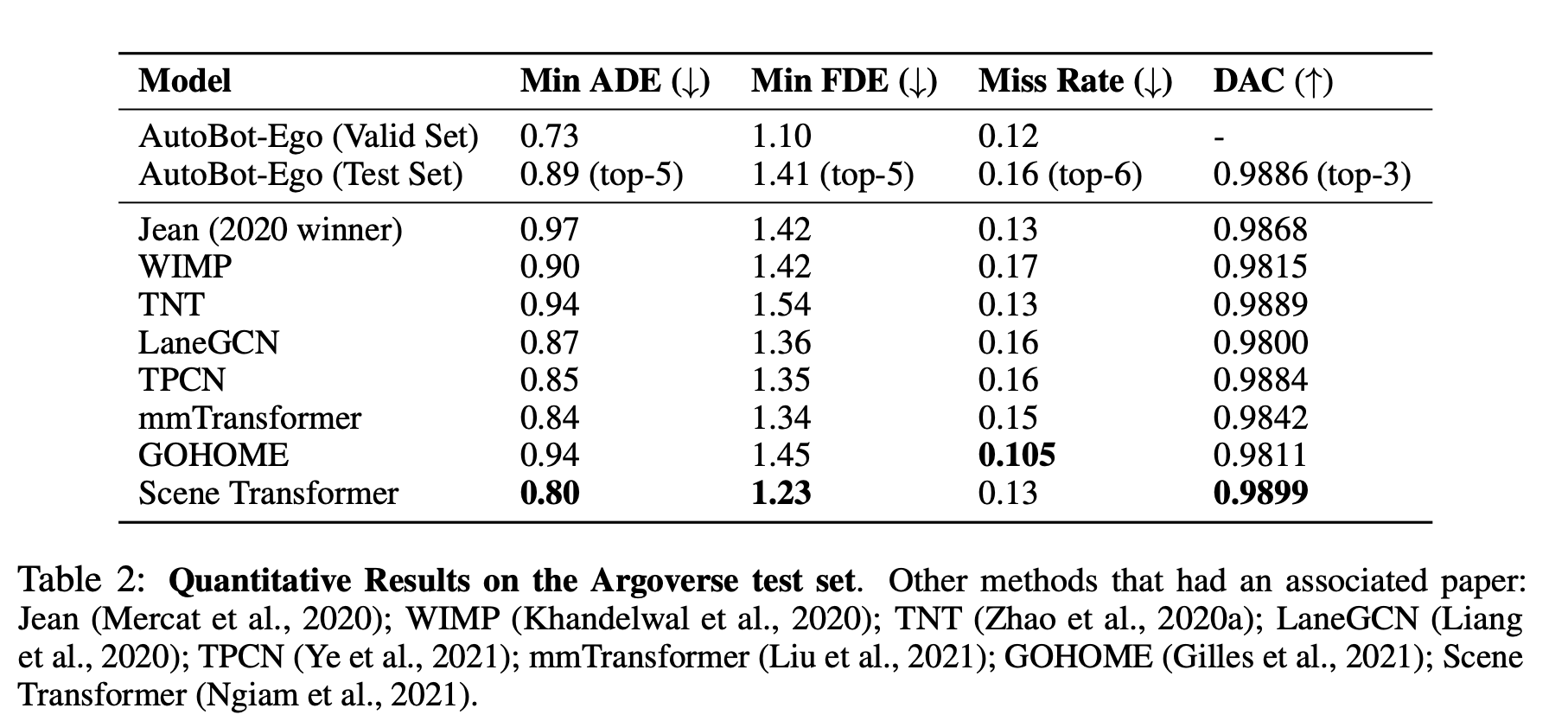
4.2 Argoverse(城市交通轨迹预测)
设置:
- 预测车辆未来轨迹,AutoBot-Ego 设置为 c=6。
结果:
-
虽然在部分指标上未超越顶尖方法(如 Scene Transformer),但模型计算量远小,训练时间仅为前沿方法的 0.4%。
-
对比 2020 年冠军 Jean 模型,AutoBot-Ego 在 Min ADE 等指标上接近或优于其表现。
4.3 TrajNet++(多智能体预测与碰撞分析)

设置:
-
输入:过去 9 帧的所有智能体轨迹。
-
输出:未来 12 帧的所有智能体预测。
-
使用 AutoBot 的完整多智能体版本,并进行消融实验。
比较模型:
-
Linear Extrapolation: 线性外推作为 baseline。
-
AutoBot-AntiSocial: 不使用 social attention 的版本。
-
AutoBot-Ego: 仅基于 ego-agent 预测。
-
AutoBot: 完整模型。
评估指标:
-
Ego-agent 的 Min ADE。
-
多智能体之间的碰撞次数。
-
Scene-level Min ADE 和 FDE。
结果:
-
完整的 AutoBot 模型显著减少碰撞次数(仅 139 次)并在 scene-level 准确度上优于其他变体。
-
说明 social attention 的引入有助于更合理地建模 agent 间互动。
4.4 Omniglot(笔画序列生成任务)
 任务设置:
任务设置:
-
Stroke Completion: 输入每个字符前半部分笔画,输出剩余部分。
-
Character Completion: 输入若干完整笔画,生成最后一个笔画。
模型比较:
- 与 LSTM(带社会注意力机制)进行比较。
结果:
-
AutoBot 能生成更连贯、符合书写习惯的字符笔画,显示其在通用序列生成任务中的潜力。
-
模型可泛化到非运动预测任务,说明其对集合序列建模的有效性。